Controlador PID-Diseño
Del diagrama de bode en Lazo Abierto sin incluir el controlador del GRÁFICO Nº1:
Para Φ=-180
Wu = 0.776 rad/seg
AR = 0.117
Se cumple el criterio de estabilidad de Bode, el sistema es estable.
Luego hallamos:
Pu = 2 P/ Wu = 8.1
Ku = 1/ AR =8.547
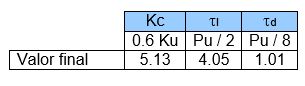
Según el criterio de Ziegler - Nichols:
Finalmente ajustando el Kc para un Margen de Ganancia igual a 2:
MG = 1 / (AR*Kc)
MG = 2
AR = 0.117
Reemplazando los valores: Kc = 4.27
Graficando el Diagrama de Bode en lazo abierto con la ayuda del Matlab:
>> Gc= (4.27*(1+ (1/(4.05*s)) +1.01*s));
>> sys2=Gp*Gv*Gm*Gc
Transfer function:
-23.75 s^3 + 23.99 s^2 + 41.23 s + 11.61
-----------------------------------------
64.56 s^4 + 169.5 s^3 + 84.81 s^2 + 8.1 s
>> bode(sys2)
>> bode(sys1,sys2)
GRÁFICO Nº4
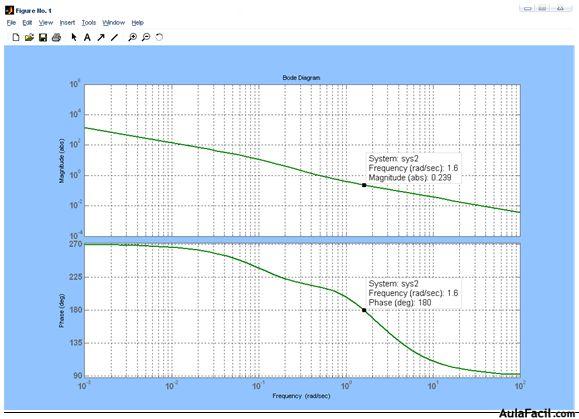
GRÁFICO Nº5
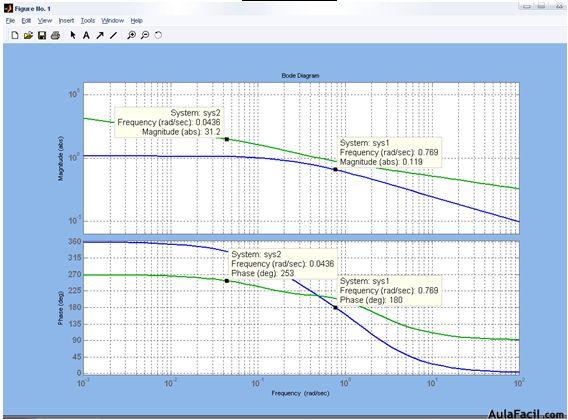
Se observa que esta vez la curva no esta tan lejos de la inestabilidad, con lo cual el controlador si bien es cierto nos ayuda a una mejor eficiencia pero aleja al proceso de su estabilidad, aunque en este caso particular es en un pequeño porcentaje.
Finalmente para poder la influencia sobre nuestro proceso se grafican el sistema con y sin controlador en la grafica Nº5.